Automated Synthesis of Bending Pneumatic Soft Actuators
Abstract
Soft robotics embraces the design philosophy of function through morphology. Therefore defining the affordances of a soft robotic structure is equivalent to determining the composition and distribution of the materials that make up the robot. This design process has historically been dominated by human intuition and labor-intensive experimentation. However, the design space of multi-material continuum structures is infinite. Automation tools to accelerate soft robot design could enable new designs to be created on-demand, specific to a need, more rapidly and at lower cost than would be possible using human labor alone. In this work we formulate the soft robot design problem as a multi-objective optimization task. We demonstrate a design automation system for bending soft actuators which integrates multi-objective heuristic search with a powerful generative encoding that converts high level design goals, compliance and forcefulness in our case, into mechanical designs automatically. These designs can be directly fabricated using a 3-D printer. We compare numerous simulated results from our optimization and a physical instance fabricated via 3-D printing with a broad survey of contemporary results from the soft robotics literature.
Type
Publication
In the 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft)
While obtaining my Master’s Degree, I collaborated closely with the MACLab, a lab located at the University of Colorado’s Boulder campus which is led by Dr. Robert MacCurdy.
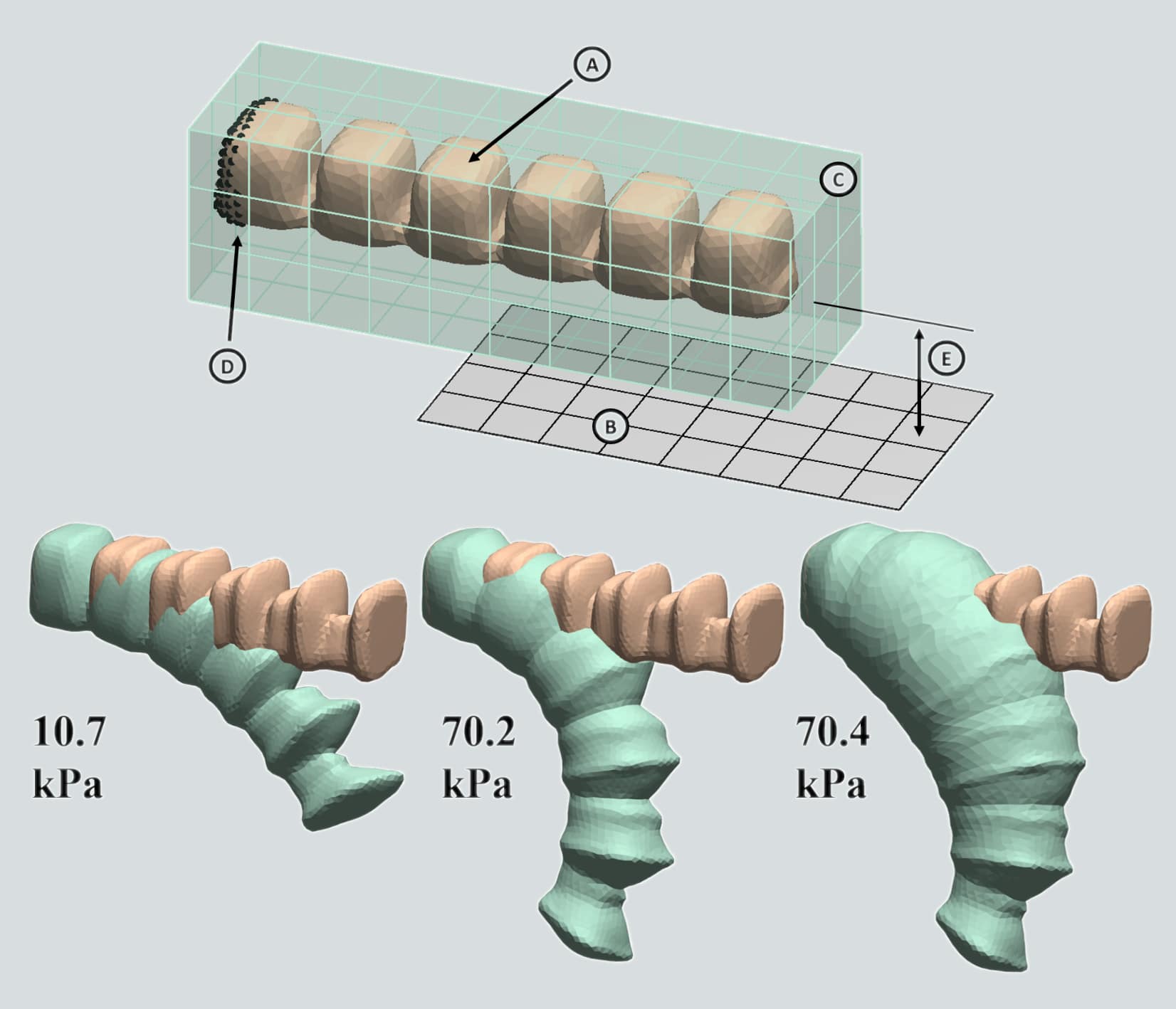
The plot above is from “Automated Synthesis of Bending Pneumatic Soft Actuators,” which was a conference paper in the 2022 IEEE 5th International Conference on Soft Robotics that I worked on alongside Lawrence Smith, Travis Hainsworth, and Dr. MacCurdy. The link to the full paper is provided below:
@inproceedings{smith2022automated,
author = {Smith, Lawrence and Hainsworth, Travis and
Haimes, Jacob and MacCurdy, Robert},
booktitle = {2022 IEEE 5th International Conference on Soft Robotics (RoboSoft)},
title = {Automated Synthesis of Bending Pneumatic Soft Actuators},
year = {2022},
pages = {358-363},
doi = {10.1109/RoboSoft54090.2022.9762105}
}