
Stretching the Boundary
While obtaining my Master’s Degree, I collaborated closely with the MACLab, a lab located at the University of Colorado’s Boulder campus which is led by Dr. Robert MacCurdy.
The images below are both visualizations from a paper that I had the privelege of working on, along with Lawrence Smith and Dr. MacCurdy. “Stretching the Boundary: Shell Finite Elements for Pneumatic Soft Actuators,” was published as part of the 2022 IEEE 5th International Conference on Soft Robotics.
| Robotic Actuator #2 | Robotic Actuator #10 |
|---|---|
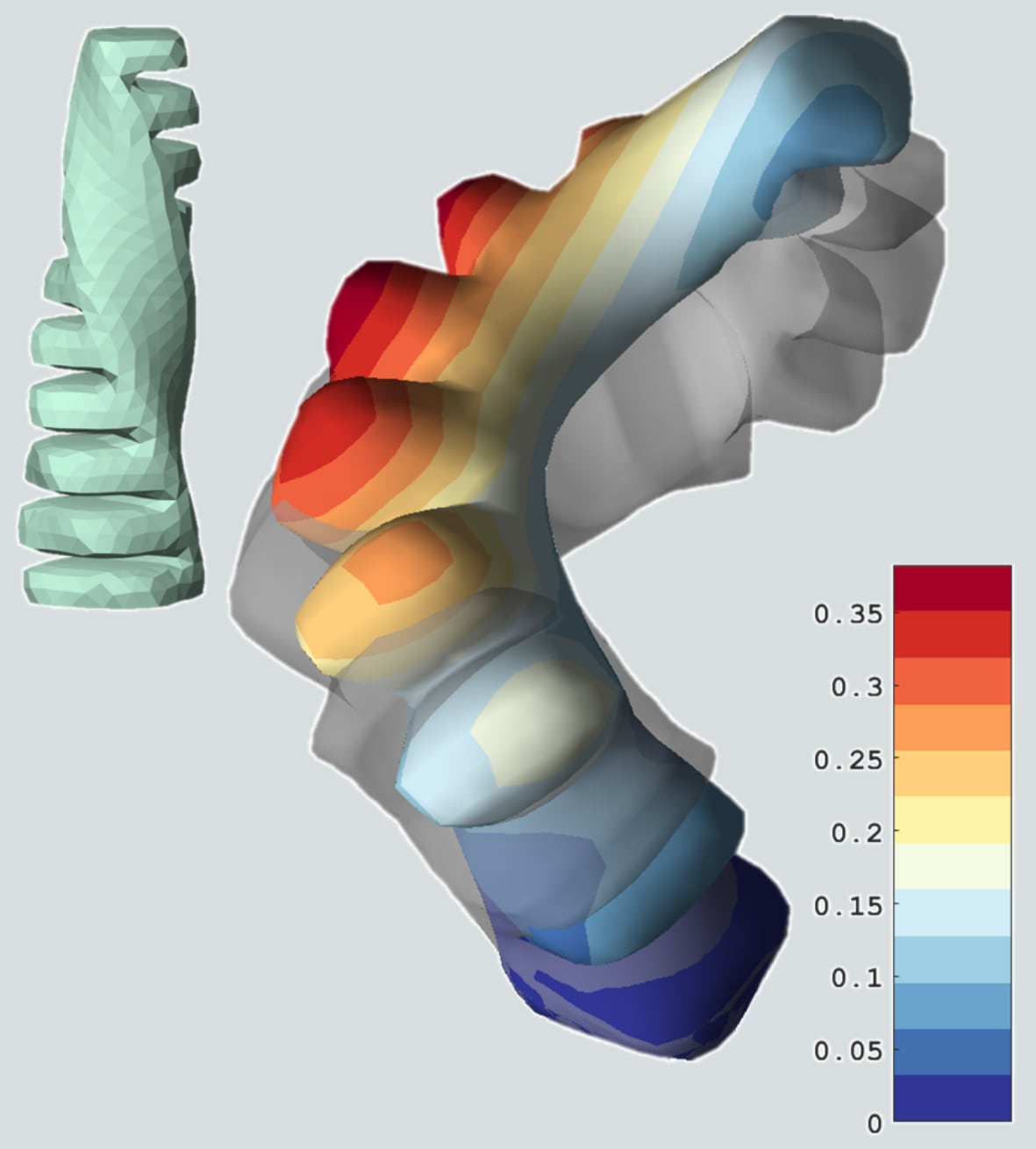 |
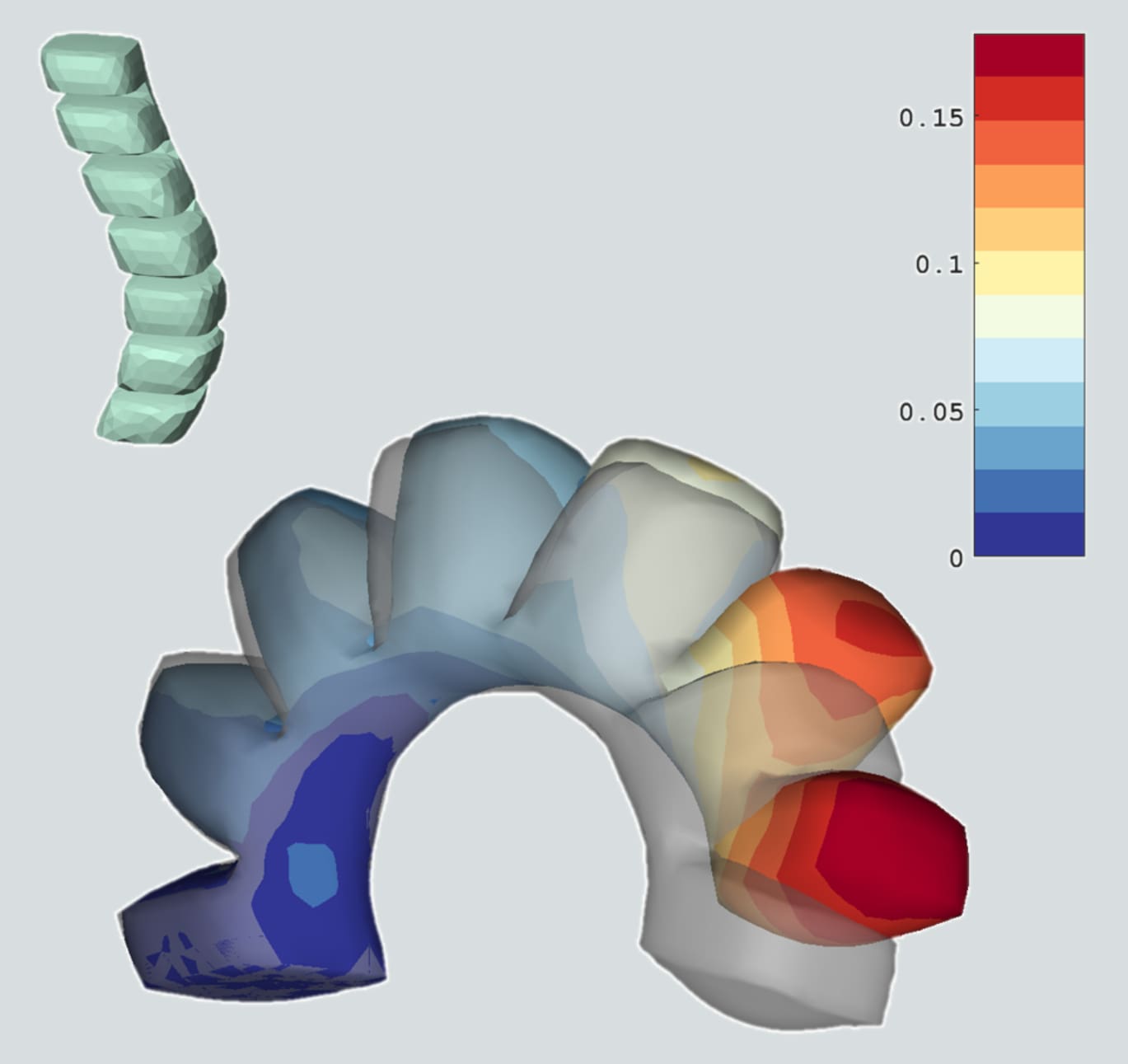 |
The link to the full paper is provided below: